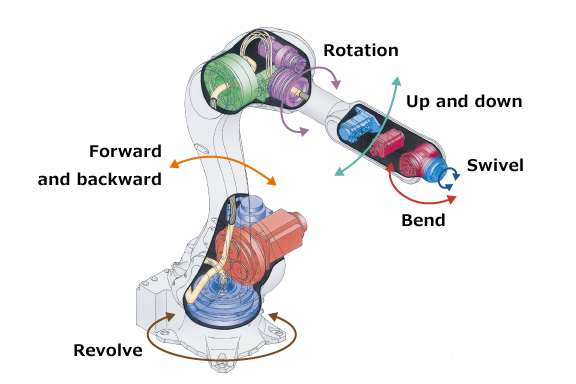
线性笛卡尔机器人和龙门机器人广泛用于自动化领域,尤其适用于拾取、放置和装配等任务。但对于需要运动的应用,例如改变零件的方向或绕过复杂障碍物,选择的机器人通常是6 轴关节机器人。
尽管灵活,但 6 轴机器人的工作范围与机器人的占地面积和有效载荷密切相关,因此如果不使用相应的大型机器人,就很难实现较长的工作范围。举个例子:典型的 6 轴机器人的工作范围小于 1000 毫米。为了达到更长的距离,机器人的底座或基座必须相应增加,以支撑机器人手臂及其有效载荷的质量和悬垂负载。例如,水平范围为 2000 毫米的 6 轴机器人可能需要 700 毫米范围内的底座直径(因此需要安装占地面积)。
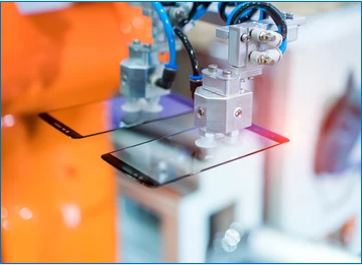
这种有限的范围可以在应用中排除 6 轴设计,否则它们将是理想的解决方案。例如,6 轴关节机器人非常适合分配流体或将胶带粘贴到形状复杂的物体上。但是,如果物体非常大,例如汽车挡风玻璃,就成本和占地面积而言,到达整个表面所需的 6 轴机器人的尺寸可能会令人望而却步。或者以需要穿越飞机机翼长度的钻孔应用为例,需要多个 6 轴机器人来覆盖整个工作区域。
尽管龙门机器人可以解决许多长行程应用,但上述操作也需要复杂的运动,而这些动作很难通过龙门机器人上的末端执行器实现。
这些应用的解决方案是将多关节机器人安装在机器人传送单元上,该单元用作第7 轴,沿线性路径传送 6 轴机器人。这扩展了 6 轴机器人的工作范围,并且可以在跨越长距离或多个工作站的应用中使用一个机器人。

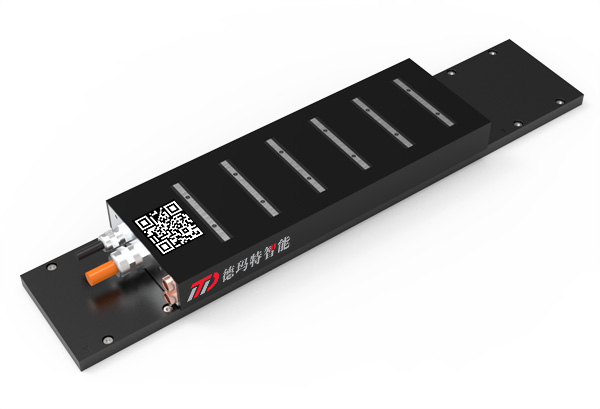
机器人传送单元可以是预组装的线性执行器,也可以由 OEM 或集成商定制,以满足特定的长度、占地面积和刚度要求。几乎任何直线执行器类型——皮带、丝杠、齿轮齿条或直线电机——都可以作第7轴,尽管皮带、齿轮齿条驱动器和直线电机是最常见的选择,因为它们可以提供极长的行程通常需要的长度。借助直线电机和齿轮齿条驱动器,多个关节机器人可以安装在一个 RTU 上并独立控制。

在为铰接式机器人确定或设计第7轴时,重要的是要记住,传输单元必须能够承受由于移动机器人及其有效载荷而产生的动态力以及静态力(并且在某些情况下,额外的动态)当机器人执行其预期过程时发生的力——例如钻孔、焊接、紧固或分配。添加第7轴还提出了其他设计注意事项,例如电缆管理以及其他设备和人员的安全,应予以解决。