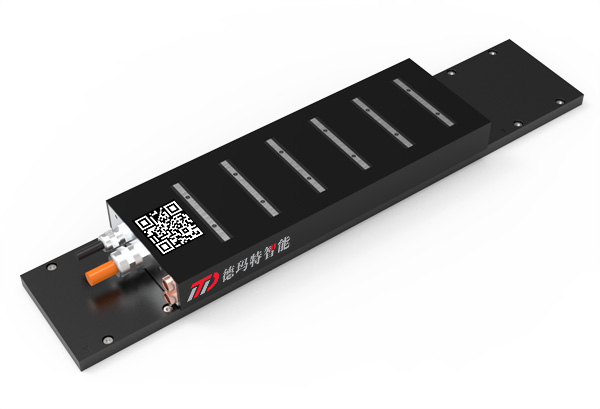
DD马达按其可选的反馈方式可分为绝对DD马达和增量DD马达。
绝对DD型马达内置单圈绝对编码器,通常在系统上电,驱动器直接与数字通信的方式,系统初始化,读马达角度位置信息,而不必执行“回到原点”操作,可以直接传输系统的精确控制,而且由于采用数字通信信号传输方式,避免了目前主流驱动器只能接受最高不超过4mhz的脉冲,马达可以以更高的速度运行,从而提高了机器的生产效率。
增量的DD马达通常是用增量编码器建造的。当系统充电时,传输系统的位置必须通过“返回原点”进行初始化和校准。否则,系统的位置就无法精确控制。增量式DD电动机为了得到更高精度和系统刚度,通常使用1VPP作为原始信号输出正弦波信号,再通过细分电路将信号转换为TTL方波信号驱动直接使用或正弦波信号细分(需要内置细分驱动器),目前通过驱动器回到起源的最精确的方法找到DD电动机内部编码“参考点”信号。